进程与线程的区别
本文共 845 字,大约阅读时间需要 2 分钟。
进程与线程的区别
一、进程和线程的关系
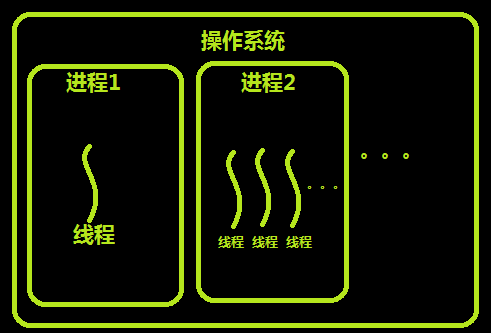
线程与进程的区别可以归纳为以下4点:
- 地址空间和其它资源(如打开文件):进程间相互独立,同一进程的各线程间共享。某进程内的线程在其它进程不可见。
- 通信:,线程间可以直接读写进程数据段(如全局变量)来进行通信——需要和互斥手段的辅助,以保证数据的一致性。
- 调度和切换:线程上下文切换比进程上下文切换要快得多。
- 在多线程操作系统中,进程不是一个可执行的实体。
二、线程的特点
在多线程的操作系统中,通常是在一个进程中包括多个线程,每个线程都是作为利用CPU的基本单位,是花费最小开销的实体。线程具有以下属性。
-
轻型实体
-
线程中的实体基本上不拥有系统资源,只是有一点必不可少的、能保证独立运行的资源。
-
线程的实体包括程序、数据和TCB。线程是动态概念,它的动态特性由线程控制块TCB(Thread Control Block)描述,TCB用于指示被执行指令序列的程序计数器、保留局部变量、少数状态参数和返回地址等的一组寄存器和堆栈。
TCB包括以下信息
:
- 线程状态。
- 当线程不运行时,被保存的现场资源。
- 一组执行堆栈。
- 存放每个线程的局部变量主存区。
- 访问同一个进程中的主存和其它资源。
-
-
独立调度和分派的基本单位
在多线程OS中,线程是能独立运行的基本单位,因而也是独立调度和分派的基本单位。由于线程很“轻”,故线程的切换非常迅速且开销小(在同一进程中的)。
\3. 共享进程资源线程在同一进程中的各个线程,都可以共享该进程所拥有的资源,这首先表现在:所有线程都具有相同的进程id,这意味着,线程可以访问该进程的每一个内存资源;此外,还可以访问进程所拥有的已打开文件、定时器、信号量机构等。由于同一个进程内的线程共享内存和文件,所以线程之间互相通信不必调用内核。
\4. 可并发执行在一个进程中的多个线程之间,可以并发执行,甚至允许在一个进程中所有线程都能并发执行;同样,不同进程中的线程也能并发执行,充分利用和发挥了处理机与外围设备并行工作的能力。
转载地址:http://axto.baihongyu.com/
你可能感兴趣的文章